
Selon la Organisation nationale océanique et atmosphérique, la part de l’océan encore à explorer représente plus de 80 %. Il nous reste encore des kilomètres et des kilomètres de surface à connaître et à cartographier avant de pouvoir nous sentir vraiment satisfaits.
Pourtant, l’exploration des mers n’est pas aussi simple qu’il y paraît.
Les navires seuls sont trop lents et trop coûteux pour accomplir un tel travail. Ils ont besoin d’une aide supplémentaire, d’un allié sur lequel compter pour explorer l’immense bleu.
C’est là qu’intervient la technologie, avec la production de robots aquatiques capables d’aller au fond des profondeurs, de contrôler l’océan et tous ses secrets.
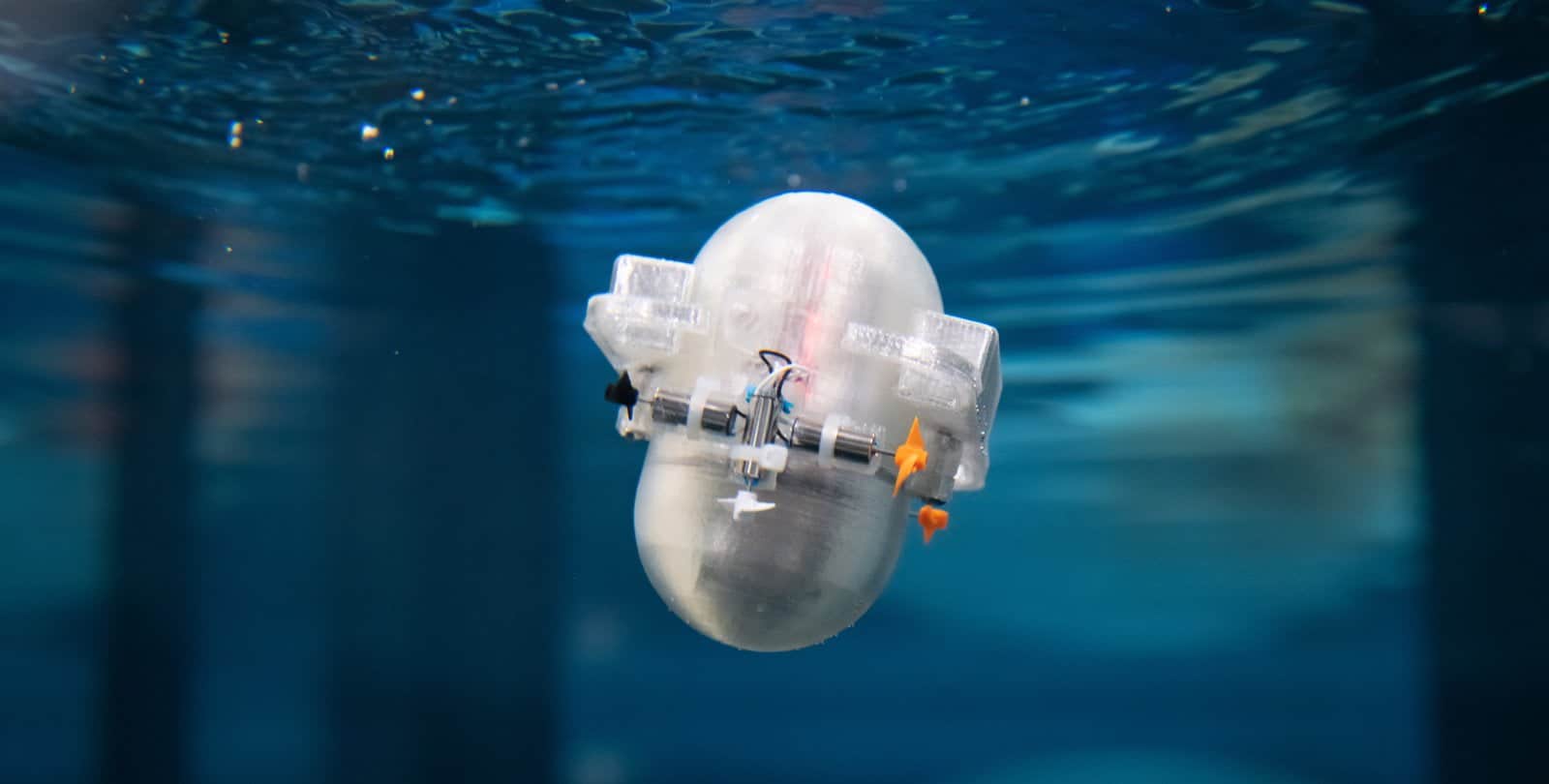
C'est ce qu'il croit John O.Dabiri, professeur d'aéronautique et de génie mécanique au California Institute of Technology. Le projet de son équipe a conduit à la création de CARL-Bot (Caltech Autonomous Reinforcement Learning Robot), un robot aquatique à peine plus qu'une main.
CARL est alimenté par un microprocesseur interne, qui lui permet de se déplacer librement et d'enregistrer tout ce qu'il observe. Une petite caméra capable d'atteindre les profondeurs les plus inconnues de l'océan, offrant ainsi aux scientifiques un outil de travail.
La mémoire de CARL et son fonctionnement
Le robot aquatique CARL doit son invention à l'étudiant diplômé de Caltech Pierre Gunnarson, qui l'a produit au sein des laboratoires Dabiri.
À l’heure actuelle, l’ABRC reçoit un certain nombre de petits changements. Il est important qu’il puisse s’orienter et naviguer seul sur l’océan, sans avoir recours à un contrôle extérieur.
Gunnarson a demandé de l'aide à l'informaticien Petros Koumoutsakos, qui a réussi à développer pour le CARL des algorithmes d’intelligence artificielle, potentiellement capables de lui apprendre à s’orienter en fonction des changements de l’environnement et des expériences passées.
Communications Nature n'ont publié leurs recherches que cette semaine, démontrant la nature extraordinaire du projet.
Les algorithmes développés par Koumoutsakos exploitent la mémoire du robot, ses « mémoires ». L'objectif, comme le confirme Dabiri, est de «utiliser ces informations pour décider comment gérer les mêmes situations à l'avenir »
Le laboratoire tourne toujours à plein régime et les scientifiques tentent de déterminer si CARL fera vraiment le travail.
Ci-dessous, la présentation laissée par Caltech sur le projet.
Pour réaliser les différents tests, l'équipe placera CARL à l'intérieur d'un réservoir, avec de petits jets capables de générer des courants horizontaux pour naviguer.
Lors des tests, nous nous chargerons également de réguler et d'alléger la charge du sensori par CARL.
Lorsqu'un robot est équipé d'outils tels que LiDAR ou des appareils photo, sa capacité à rester longtemps dans l'océan avant de devoir changer la batterie devient assez limitée. En allégeant la charge sur les capteurs, les chercheurs pourraient augmenter la durée d’utilisation du CARL et obtenir de bien meilleurs résultats.
Le projet « méduses bioniques » qui explore l’océan
Le logiciel du CARL, compte tenu de son incroyable complexité, pourrait servir de « précurseur » à d'autres projets innovants.
L'année dernière, le groupe de Dabiri - toujours le même groupe - a publié une recherche concernant l'utilisation du zapping électrique pour contrôler les mouvements d'un méduse .
L'ajout d'une puce similaire à celle du CARL permettrait aux chercheurs de mieux guider les méduses à travers l'océan.
Contrairement aux robots, les méduses n'auraient aucune limite de profondeur, elles pourraient atteindre pratiquement n'importe quel endroit.
CARL n’est que le début d’un projet beaucoup plus vaste, qui nous permettra d’observer de près chaque recoin de la surface de la mer. La vision de Dabiri est formidable et enthousiaste, il ne reste plus qu'à attendre les prochaines mises à jour.
Pourriez-vous un jour dans le futur imaginer 10.000 XNUMX ou un million de CARL (nous leur donnerons des noms différents, je suppose) allant tous dans l'océan pour mesurer en même temps des régions auxquelles nous ne pouvons tout simplement pas accéder aujourd'hui afin d'obtenir une heure -image résolue de la façon dont l'océan change. (…) Ce sera vraiment indispensable pour modéliser les prévisions climatiques, mais aussi pour comprendre le fonctionnement de l'océan.

