
Quand je pense à des robots quadrupèdes comme BigDog ou les dernières nouveautés de Stanford il est vraiment difficile de ne pas les comparer avec des animaux quadrupèdes comme les chats et les chiens.
En fait, ces dernières années, les robots quadrupèdes ont commencé à aborder les capacités de leurs homologues biologiques dans quelques situations très spécifiques, comme marcher sans tomber.
La nature fournit un étalon-or que les robots tentent d'atteindre et il faudra beaucoup de temps pour créer des quadrupèdes capables de faire tout ce que les animaux peuvent faire.
Ce qui est bien avec les robots, cependant, c'est qu'ils n'ont pas à être liés par la biologie. Il est toujours possible d’apprendre de nouveaux comportements pour lesquels les animaux ne sont tout simplement pas conçus.
Lors de l'IROS 2019 la semaine dernière, nous avons vu un tel exemple, avec des robots quadrupèdes capables de grimper sur des échelles verticales.
Pour générer le comportement d'escalade autonome du robot, les chercheurs ont utilisé un réseau neuronal qui l'a entraîné à gravir les échelons. Le comportement a été créé pour cet escalier spécifique, mais les chercheurs prévoient de généraliser le système afin que le robot puisse monter de nouveaux escaliers sans formation préalable.
Cela semble facile
L'escalade d'une échelle verticale est assez difficile pour les quadrupèdes biologiques : les chats et les chiens peuvent le faire, même si vous les voyez généralement grimper sur des échelles inclinées (appuyées contre quelque chose) plutôt que verticales. Le problème est que plus la pente d’une échelle augmente verticalement, plus il est nécessaire de supporter un poids croissant en tenant les barreaux, et les animaux comme les chiens et les chats ne disposent pas de systèmes de préhension solides.
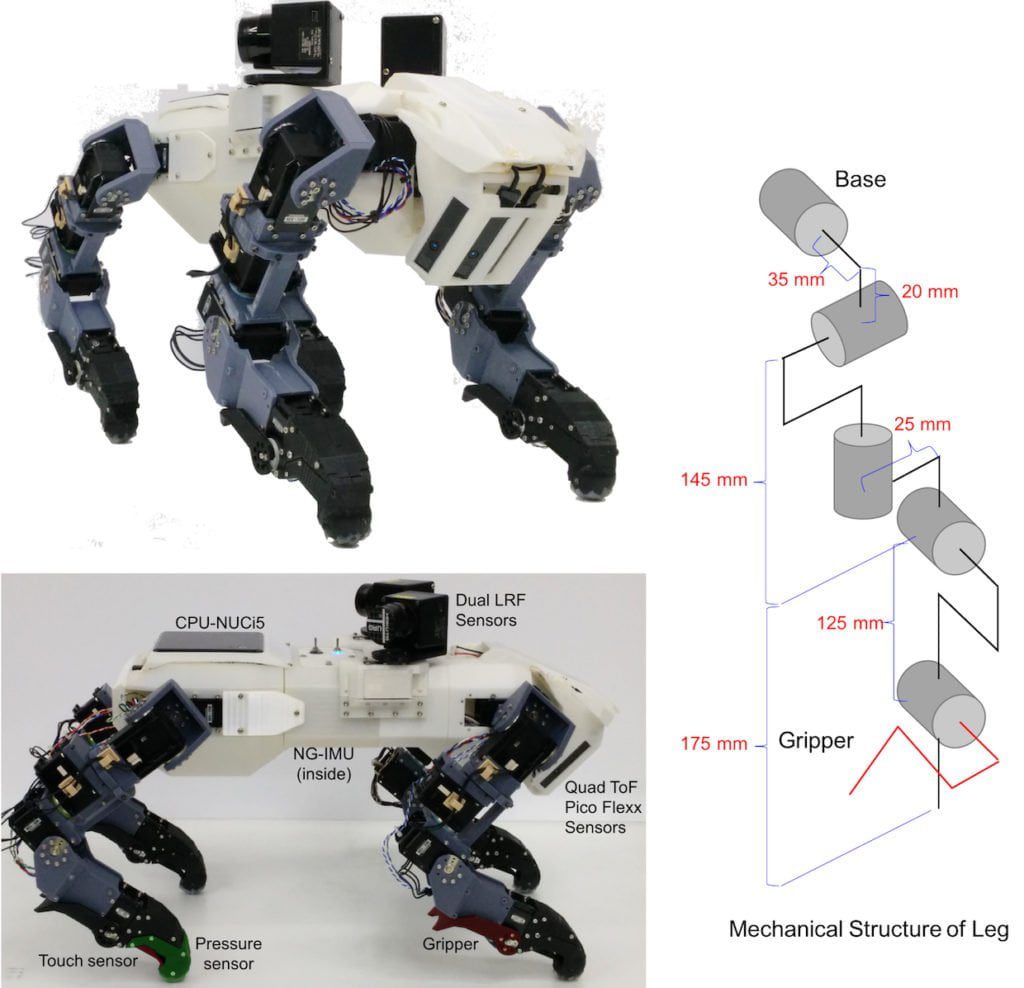
Pour gravir les échelons, le robot quadrupède est équipé d'une centrale inertielle (IMU), d'une caméra 3D, de capteurs tactiles et de capteurs de pression sur chaque griffe.
Un ordinateur Intel NUC fait office de système de contrôle principal. Un Arduino utilisé comme contrôleur secondaire pour gérer les signaux d'entrée-sortie des capteurs internes.
La plupart des robots quadrupèdes (contrairement aux robots bipèdes comme ATLAS) ne dispose pas de systèmes de préhension robustes, mais les ajouter semble être une idée prometteuse à explorer.
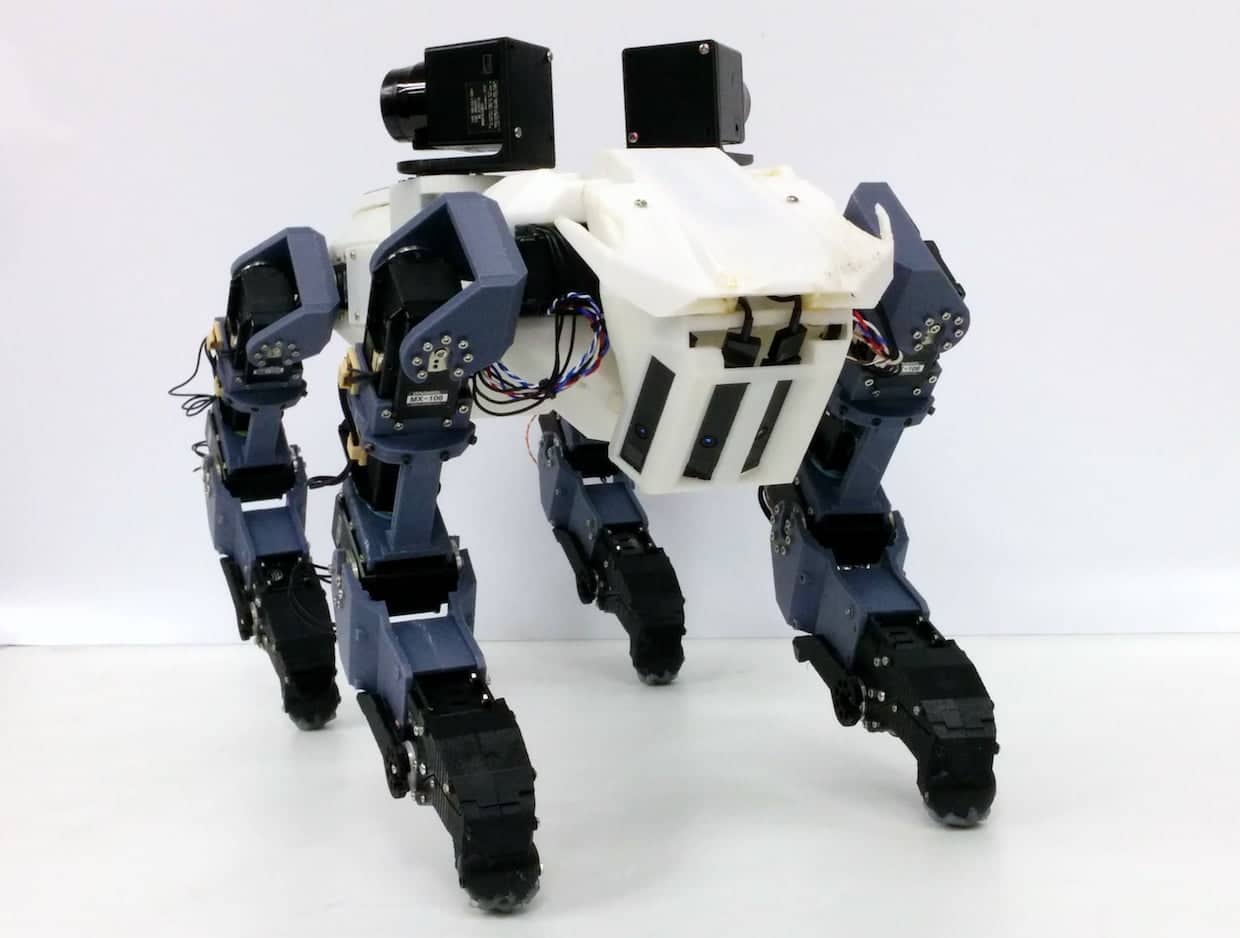
Les robots quadrupèdes de l'Université métropolitaine de Tokyo ont une sorte de pouce opposable qui transforme les jambes en pinces. Et c'est précisément avec ces pinces qu'il monte sur des escaliers verticaux de manière totalement autonome.
Les « nouveaux » robots quadrupèdes passent partout
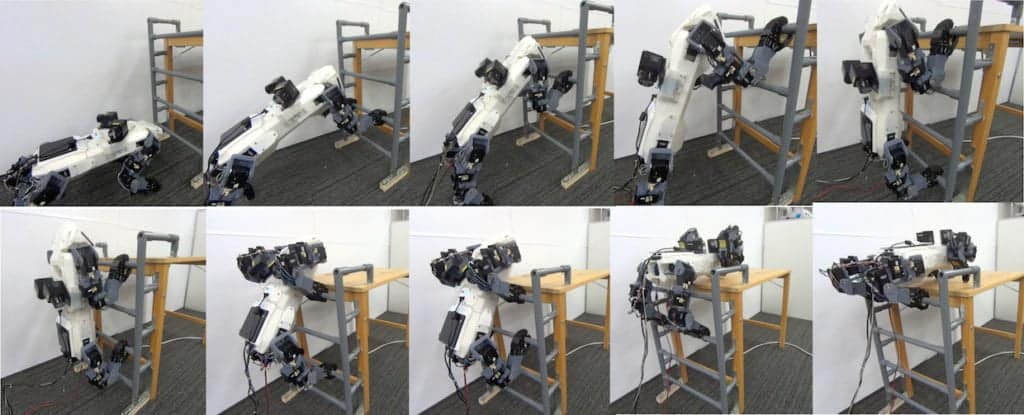
La transition de l'échelle à la surface supérieure semble assez difficile à réaliser. Pour cette raison, la manière dont le robot utilise ses pattes arrière pour saisir la marche supérieure et l'utiliser pour se pousser sur la plate-forme est particulièrement intelligente.
Encore un peu et ils pourront aller partout. Si j'étais toi, je commencerais à m'enfuir.
L'étude « Nouvelles capacités des robots quadrupèdes montant des échelles verticales sans support » a été présenté à l'IROS 2019 à Macao.

