
En matière de robotique, il semble que les ingénieurs s'inspirent beaucoup de la nature. Si vous jetez un oeil à notre tag "biomimétisme"Vous trouverez les robots les plus disparates avec des formes plus ou moins animales, souvent juste des serpents, tout en réparant des pipelines sur le fond marin, en creusant des tunnels et bien plus encore.
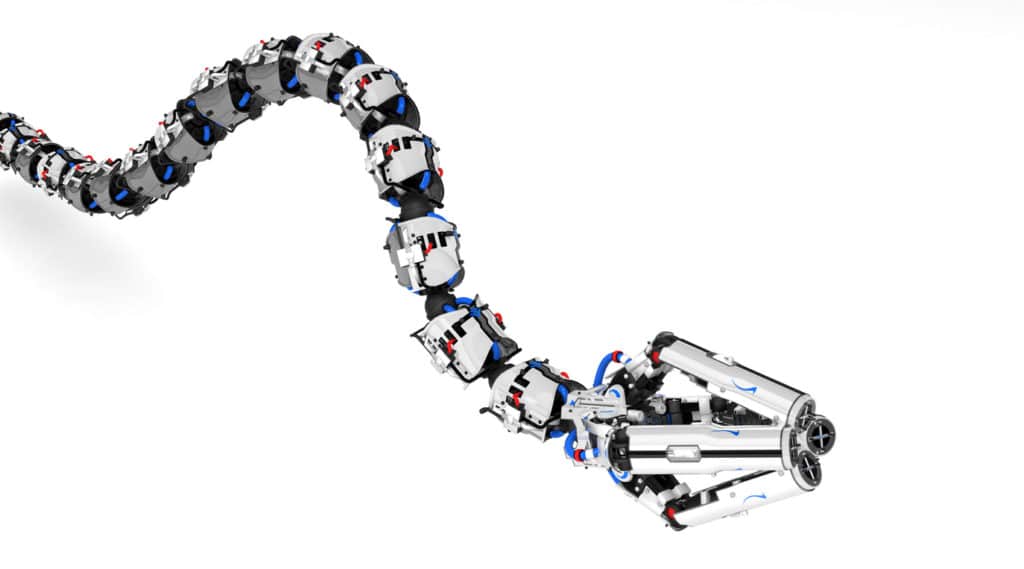
Maintenant de un communiqué de presse du Continuum Robotics Lab de l'Université de Toronto annonce qu'une équipe dirigée par Jessica Burgner Kahrs construit des robots très minces, flexibles et extensibles qui pourraient être utilisés par les médecins pour sauver des vies, en accédant à des points autrement impossibles pour un chirurgien.
Des robots serpents pour sauver des vies
« Prenons l’exemple d’un neurochirurgien qui doit retirer une tumeur cérébrale. Avec un instrument chirurgical traditionnel et rigide, le médecin doit atteindre la masse cancéreuse en suivant un chemin droit jusqu'au cerveau et risquer de pénétrer (et d'endommager) les tissus vitaux", peut-on lire dans le communiqué.
L’équipe expérimente également de nouveaux robots serpents encore plus adroits et extensibles. L'un d'eux s'inspire de l'origami, est très léger et peut s'étirer jusqu'à 10 fois plus que les autres modèles. Ils ne peuvent que s’améliorer encore.
Burgner-Kahrs imagine les scénarios d'utilisation dans lesquels l'un de ses robots ressemblant à des serpents, guidé par un chirurgien, pourra parcourir un tronçon tortueux autour du tissu vital tout en atteignant un point précis à opérer. Résultat? Des tumeurs cérébrales auparavant « impossibles » peuvent soudainement devenir opérables.
Ce n’est pas une mince affaire, bien au contraire : ces « serpents » pourraient révolutionner toute l’industrie médicale.
Trois questions pour l'avenir de la chirurgie de précision
L'idée que des robots flexibles sophistiqués puissent aider les chirurgiens (même de manière semi-autonome, les chercheurs travaillent déjà) est absolument fantastique.
Pour y parvenir, Burgner-Kahrs travaille en se posant quatre questions précises :
- Comment contrôler les robots pour les déplacer encore plus précisément dans des environnements confinés et tortueux ?
- Pouvons-nous concevoir une interface plus intuitive entre un humain et un robot ?
- Peut-on fabriquer des robots serpents entièrement autonomes ?
- Comment pouvons-nous utiliser plusieurs robots en équipe pour réaliser une tâche collaborative ?
L'avenir dépendra des réponses.

